🤖 Duc-Cuong VU, BSc.
E-mail / ORCID / LinkedIn / Google Scholar / GitHub / CV
✍️ about me
I am currently pursuing a Master of Science in Automation and Control at the Hanoi University of Science and Technology (HUST), Vietnam, under the supervision of Assoc.Prof.Dr. Tung Lam Nguyen. My research thesis focuses on the application of Stewart platforms in marine environments, funded by the Vingroup Innovation Foundation (VINIF). Previously, I earned my Bachelor of Science in Automation and Control at HUST, where I received the Best Thesis Defense Award for my thesis on balancing, motion planning, and tracking control for ballbot systems.
My research interests span control theory, optimization in control, robotics, and experimental systems. Currently, I am focusing on bridging the gap between simulation and real-world applications. This approach enhances the comprehensiveness of my thesis by integrating both theoretical analysis and practical implementation.
📣 news
📚 selected publications
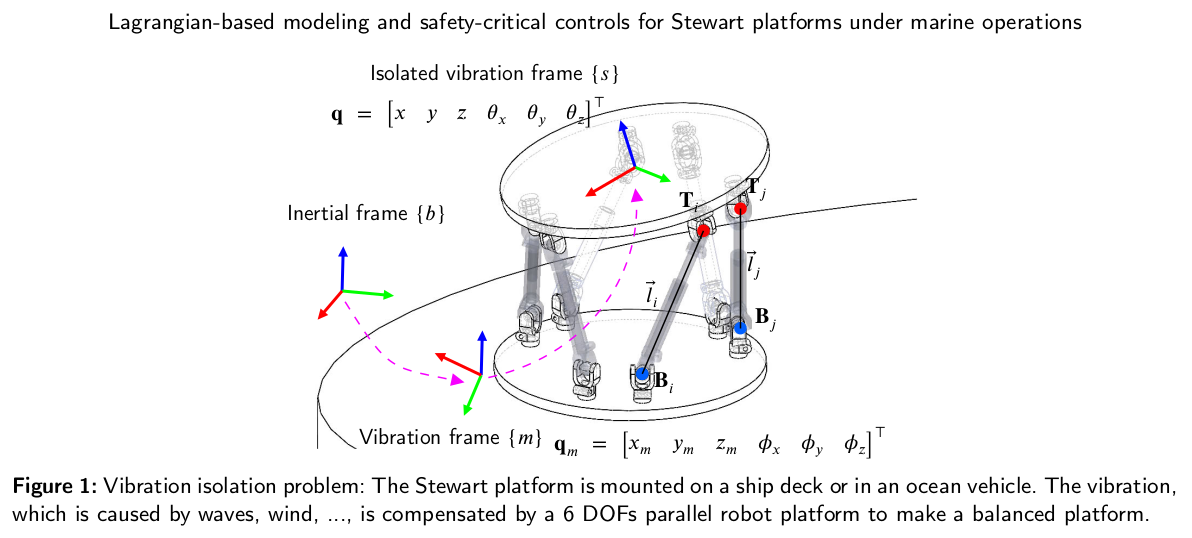
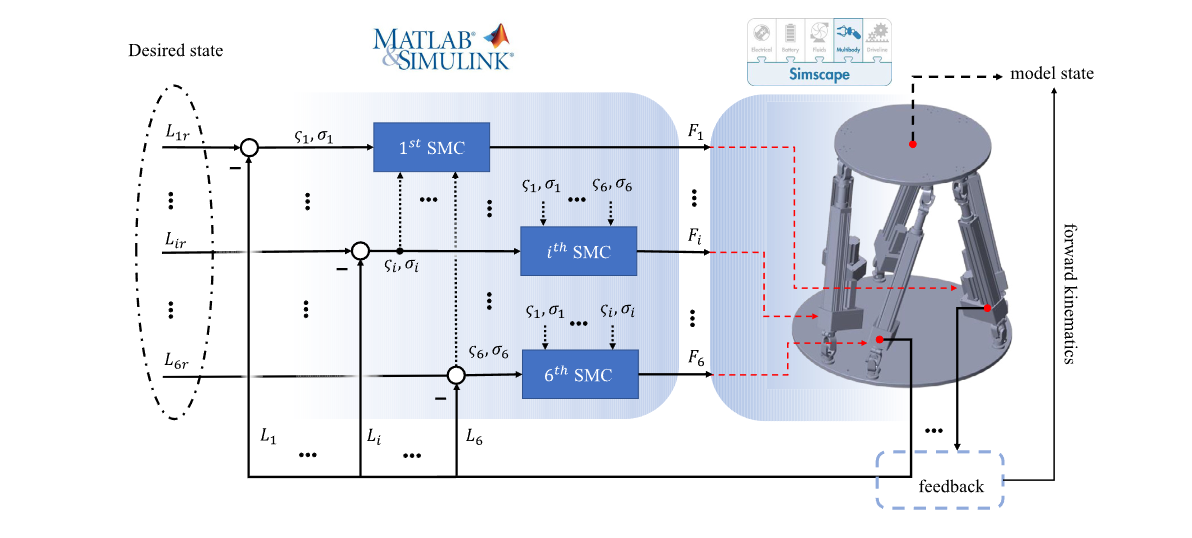
📝 Lagrangian-based modeling and safety-critical controls for Stewart platforms under marine operations
Duc Cuong Vu, Danh Huy Nguyen, Minh Nhat Vu, and Tung Lam Nguyen
Ocean Engineering, 2025
📝 CBFs-based Model Predictive Control for Obstacle Avoidance with Tilt Angle Limitation for Ball-Balancing Robots
Minh Duc Pham, Duc Cuong Vu, Thi Thuy Hang Nguyen, Thi Van Anh Nguyen, Minh Nhat Vu, and Tung Lam Nguyen
IEEE Access, 2025
📝 A novel approach of Consensus-based Finite-time Distributed Sliding Mode Control for Stewart platform manipulators motion tracking
Duc Cuong Vu, Danh Huy Nguyen, and Tung Lam Nguyen
Results in Engineering, 2025
📝 Time-optimal trajectory generation and observer-based hierarchical sliding mode control for ballbots with system constraints
Duc Cuong Vu, Minh Duc Pham, Thi Thuy Hang Nguyen, Thi Van Anh Nguyen, and Tung Lam Nguyen
International Journal of Robust and Nonlinear Control, 2024
💼 work experience
- Conducted research on advanced control strategies, robotics, motion control, and multi-agent systems, focusing on both theoretical development and practical implementation.
🎓 educations
- Research topic: Design control structures for Parallel Platforms in Maritime applications
- Funded by: Master, PhD Scholarship Programme of Vingroup Innovation Foundation (VINIF)
- CPA: 3.71/4.0 (Excellent degree). Rank: 22/499
- Thesis: Balancing, motion planning and tracking control for ballbot systems (The best thesis defense) [pdf]